Biography
I am Yan Miao, a PhD student at UIUC, advised by Prof. Sayan Mitra. My research focuses on developing robust vision-based controller for autonomous systems, specifically targeting quadrotors and fixed-wing aircrafts. By leveraging VLA, imitation learning and 3D Gaussian Splatting as the digital twin, I explore zero-shot sim-to-real transfer of vision-policy learned in photorealistic simulation to real-world aircrafts.
Before joining Prof. Mitra’s group, I got my bachelor’s degree at UIUC with High Honors.
Download my CV.
Latest News:
- [09/2025] Our FalconWing paper accepted at Neurips EWM Workshop
- [06/2025] Our FalconGym paper has been accepted to IROS 2025!
- [06/2025] Spotlight Oral: Vision-based UAV Landing at RSS GRRA Workshop
- [05/2025] Starting Research Intern position at Toyota Research Institute North America (TRINA)
Interests
- Vision-based Control
- Sim-to-Real Transfer
- Learning-based Robotics
Education
M.S. in Computer Engineering, 2024
University of Illinois at Urbana-Champaign
B.S. in Computer Engineering, 2021
University of Illinois at Urbana-Champaign
Publications
(2025).
Performance-Guided Refinement for Visual Aerial Navigation using Editable Gaussian Splatting in FalconGym 2.0.
Under Review at ICRA 2026.
(2025).
Towards Unified Probabilistic Verification and Validation of Vision-Based Autonomy.
In ATVA 2025.
(2025).
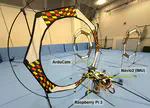
FalconWing: An Open-Source Platform for Ultra-Light Fixed-Wing Aircraft Research.
Oral Spotlight at GRRA @ RSS 2025.
(2025).
FalconGym: A Photorealistic Simulation Framework for Zero-Shot Sim-to-Real Vision-Based Quadrotor Navigation.
In IROS 2025.
(2024).
From Dashcam Videos to Driving Simulations: Stress Testing Automated Vehicles against Rare Events.
In ML4AD @ AAAI 2025.
(2024).
Safe Autonomy: Continuous Testing and Controller Compensation for Unreliable Perception.
Master Thesis.
(2023).
Correcting Learning-based Perception for Safety.
Working Paper.
(2022).
Watch out for the risky actors: Assessing risk in dynamic environments for safe driving.
In ML4AD @ Neurips 2022.
Experience
Research Intern
Responsibilities include:
- Developed FalconGym 2.0: a 3D Gaussian Splatting based photorealistic simulator with open-source API to modify the objects and the background environment
- Trained vision-only control policy for quadrotors & UAVs to navigate through a sequence of narrow racing gates in FalconGym 2.0
- Leveraged FalconGym2.0’s editability to focus visual controller’s training on challenging tracks and iteratively improve controller performance via curriculum learning
- Zero-shot deployed FalconGym2.0-trained policy on a real quadrotor with 98% success in 30 trials
Research Intern
Responsibilities include:
- Developed an automated pipeline to convert real-world dashcam videos into detailed simulation scenarios for autonomous vehicle (AV) testing
- Achieved time efficiency with scenario generation averaging 1.5 minutes per test case, significantly reducing manual coding time for real-to-simulation conversions
- Implemented iterative refinement to enhance scenario accuracy and realism, improving 34% of test cases in an evaluation of 50 accident scenarios
- Demonstrated automation success with 64% of scenarios fully automated from the Car Crash Dataset (CCD), requiring no human intervention
- Presented work at ML4AD @ AAAI 2025 via both poster and 5-minute spotlight talk
Projects
*

Awards
1st PLACE Most Engaging
2022 Engineering Open House
1st PLACE The Spirit of Innovation
2022 Engineering Open House
2nd PLACE Outstanding Tech Exhibit
2022 Engineering Open House
Teachers Ranked as Excellent


Contact
- yanmiao2@illinois.edu
- Room 332 in Coordinated Science Lab, 1308 W Main St, Urbana, IL 61801