Abstract
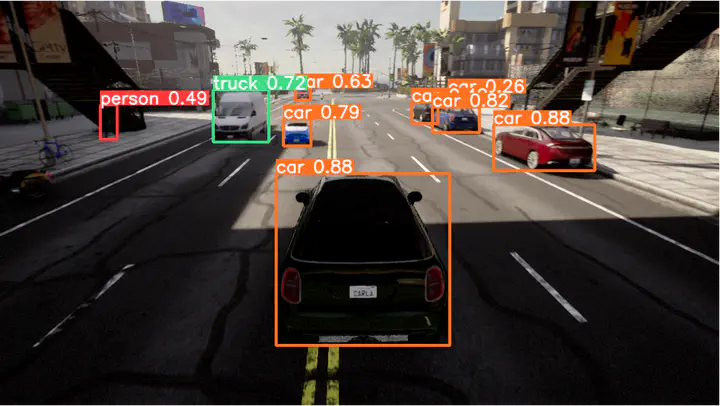
Driving in a dynamic environment that consists of other actors is inherently a risky task as each actor influences the driving decision and may significantly limit the number of choices in terms of navigation and safety plan. The risk encountered by the Ego actor depends on the driving scenario and the uncertainty associated with predicting the future trajectories of the other actors in the driving scenario. However, not all objects pose a similar risk. Depending on the object’s type, trajectory, position, and the associated uncertainty with these quantities; some objects pose a much higher risk than others. The higher the risk associated with an actor, the more attention must be directed towards that actor in terms of resources and safety planning. In this paper, we propose a novel risk metric to calculate the importance of each actor in the world and demonstrate its usefulness through a case study.
Yan Miao
Ph.D. Candidate in Computer Engineering
My research interests include autonomous system design and vision-based control.